
フィギュアの場合、型にワイヤー仕込んでシリコンでコーティング
しているみたいなのですが、現在の自分の技術力では難しそうなの
で、ワイヤー(針金)に液体ゴムを塗る方法を採用しました。
左の写真は、液体ゴムです。水性で扱い易いです。ゴムと言うより
シリコンと言った感じですが、良く伸びますし、滑らなくなります。
液体ゴム以外に「変成シリコンコークQ」と言うのも試してみまし
た、液体ゴムほどゴムっぽくないのですが、素材への食付きは、
こちらの方が良いような気がします。液体ゴムだと剥がれてしまう
箇所に使うと良いような気がします。
その他に「ラテックス」も実験してみたのですが、こちらはどうも
扱い難いのと、臭いがキツイので却下しました。

今までと同じ方法で針金の骨組みを作り、液体ゴムを塗ってみました。
液体ゴムは木工用ボンドと似たような感じで、爪楊枝で簡単に塗れま
した。ただ、一度に厚塗りするのは困難だったので2回塗りしてます。
ウロコ模様は入れられなったのですが、パッと見はいい感じです。
液体ゴムはアクリル絵具を混ぜると着色できるとの事なので、色も
問題ないはずです。
針金(銅線)を使っているので、握力もあり、液体ゴムで滑らないの
で、かなり安定していい感じです。
ただ、何度か動かしていたら銅線が折れました。また、0.9mmの銅線
を曲げるのが思ったより難儀でした。
銅線がいけないのかと思い、アルミ線、より線(電線)、ピアノ線
などで試してみたのですが、アルミ線は結構簡単に折れ、より線は
液体ゴムが安定しないし、狙った形に曲がらず変な方向に曲がって
しまいます。ピアノ線は硬くて曲げられないです。
結果として、悪くは無いのですが、一度形を決めたら基本的に曲げ
ないようにする必要がありそうです。
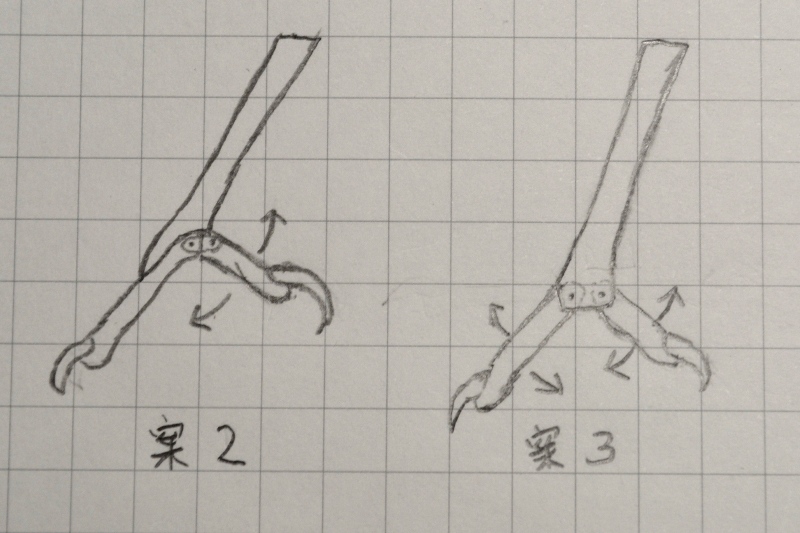
ワイヤー方式以外の方法も試してみようと思い、組立て式の足も
少し試作することにしました。左の写真は簡単な設計図です。

爪楊枝、割り箸、真鍮線、銅線、液体ゴムで試作2を作ってみました。
後趾だけ可動します。
足の裏に液体ゴムを塗っているので、滑らないのですが、握力が弱い
ので安定しなかったです。この方法ならパーツにウロコを入れる事も
可能で、キャストすれば量産も容易かもしれないので惜しいです。

試作3では、内趾、中趾、外趾がまとめて動くようにしました。
関節数が増えているので、試作2よりもポーズの幅が広がり、少しは
安定したように思うのですが、試作1に比べると握力が弱いです。
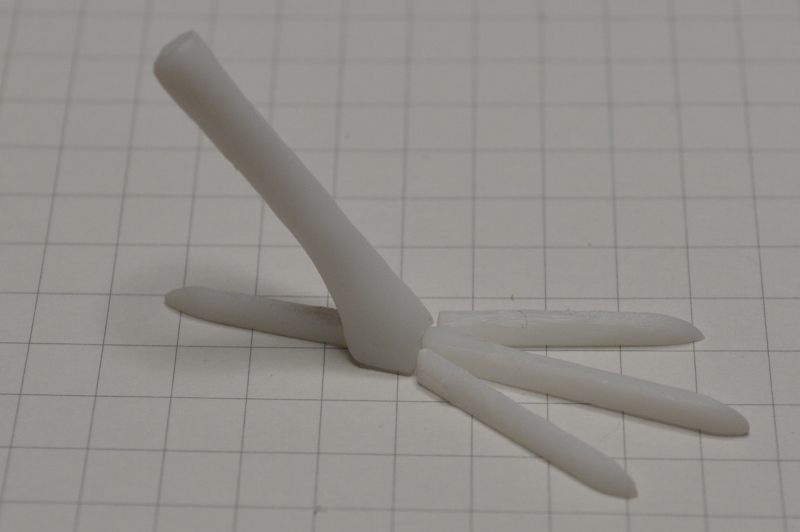
試作3までは、割り箸や爪楊枝で作っていたのですが、穴あけ加工時に
割れたりするので、試作4ではプラ棒で作る事にしました。左の写真は
試作3ベースでパーツの削りだしまで行ったところです。
加工精度は格段に上がりました。ただ、このまま作っても試作3と同じ
ように握力問題が発生するのは確実なので、内部にバネを入れようと
思いました。
一応、いくつか設計してみたのですが、バネを入れるとなると、どうし
ても加工が難しくなります。なので、試作4は現在保留中です。
ここまでは、いい感じなので復活するかもしれません。
一週間、試作したり、色々実験したり、寝ても覚めても足の事ばかり
考えていたのですが、どの案も一長一短あって、決まらないです。
展示会の日程を考えるとタイミリミットっぽいので、今回の開発は
断念するか、オーソドックスな案1を採用しようと思います。
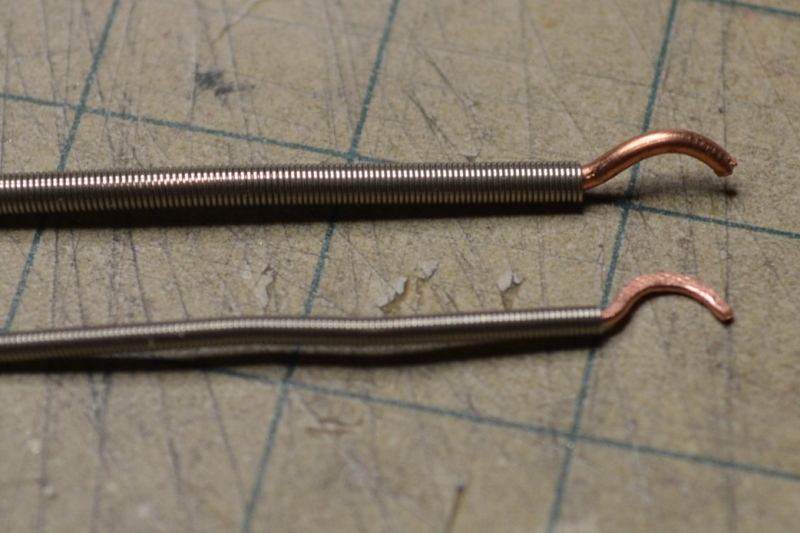
試作4で使えないかと思い、スプリング(ザクとかに使うヤツ)を
用意してみたのですが、これが結構良い感じです。スプリングの中
に銅線を通すと、形が安定し、曲げやすい細い銅線でも問題なさそ
うです。
ただ、スプリングに液体ゴムが上手く付くか、かなり怪しいです。
また、銅線が折れるリスクはあります。今週は時間切れなので、
残念ながらここまでです。
苦手な立体&動作を、頭の中でシミュレートしまくったので頭痛が
します。製造系の作業ばかりでも飽きますが、開発系の作業は疲れ
ます・・・。